|
||||
|
Глава 12 Робот – солнечный шар Идею создания подобного робота первоначально выдвинул Ричард Вейт из Северного Йорка, Торонто. Ричард построил робота, ищущего источник света, заключенного в прозрачную сферу (шар). Затем, в более недавнее время, Дейв Хранкиу из Калгари, Канада, так сказать, «поднял этот шар» и построил серию передвижных роботов – солнечных шаров, ищущих источники света. Можно отметить два любопытных качества, которыми обладают подобные роботы (см. рис. 12.1). Первое из них – способ передвижения. Внутрь шара помещен редуктор. Один из концов вала редуктора наглухо прикреплен к внутренней стороне поверхности прозрачной сферы. Жесткое крепление вала редуктора препятствует его вращению, что вынуждает вращаться сам редуктор. Редуктор имеет достаточно большой вес, что перемещает центр тяжести сферы вперед. По этой причине сама сфера катится вперед. 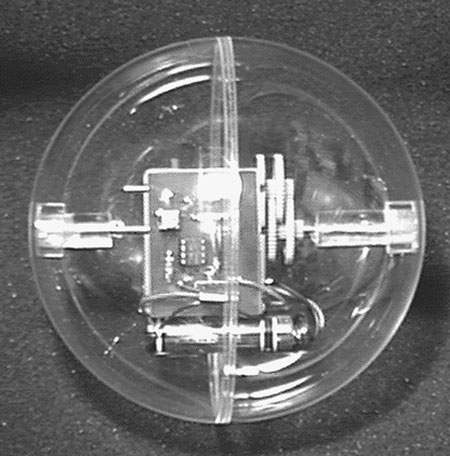 Рис. 12.1 Робот – солнечный шар В состоянии покоя центр тяжести редуктора находится в нижней мертвой точке (нижнее положение редуктора), и шар покоится, т. е. оказывает сопротивление качению. При включении редуктора он начинает вращаться внутри шара. Это вращение перемещает центр тяжести шара вперед, и шар, таким образом, катится в прямом направлении. Второе качество относится к способу питания конструкции редуктора. Первоначально солнечные роботы имели бортовой источник питания, что позволяло подводить питание к редуктору в прерывистом режиме (более подробно это было изложено в гл. 3). Бортовой источник питания состоит из батареи солнечных элементов, основного конденсатора и триггерной или низкочастотной генерирующей схемы. При освещении световым потоком солнечная батарея начинает заряжать основной конденсатор. Когда значение напряжения на конденсаторе достигнет пороговой величины, триггерная схема пропускает накопленный заряд через двигатель с высоким КПД, соединенный с редуктором, что вызывает небольшое перемещение робота вперед. В данной конструкции робота использована аналогичная конструкция редуктора, но для его питания использованы два элемента АА. Недостатком батарей является необходимость их замены после использования. Однако их преимущество в том, что питание на схему робота подается постоянно, что позволяет нам легко изучать его поведение (в основном фототропизм), движение и перемещения. В оригинальной конструкции робота для изучения этих эффектов требовался метод замедленной съемки. В зависимости от уровня освещенности, каждая зарядка конденсатора занимает несколько минут. Когда заряд протекает через двигатель, робот чуть-чуть откатывается вперед. Например, 10 часов движения оригинальной модели солнечного робота сжимаются в несколько минут при изучении данной конструкции. Данному роботу не требуется электронных схем управления бортовым источником питания, однако и ему необходим световой выключатель. Схема, изображенная на рис. 12.2, управляет подачей напряжения от батареи на двигатель редуктора. Схема определяет уровень освещенности, «видимой» роботом. Если уровень освещенности достаточно высок, то схема включает двигатель. Пороговое значение уровня освещенности может регулироваться с помощью переменного резистора V1. 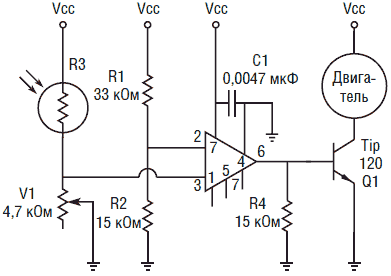 Рис. 12.2. Принципиальная электрическая схема солнечного шара Конструкция редуктора Перед тем как мы приступим к изготовлению робота, давайте посмотрим на конструкцию редуктора (см. рис. 12.3). Физические размеры редуктора меньше обычных и его легче смонтировать внутри сферы. Передаточное число редуктора 1000:1. Чем больше передаточное число, тем медленнее будет двигаться робот. 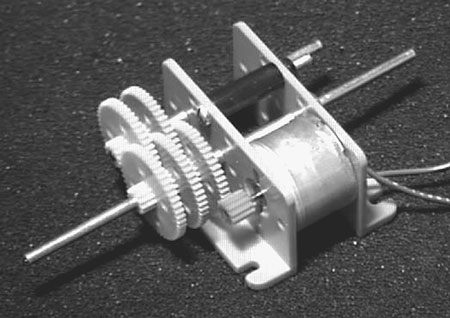 Рис. 12.3. Редуктор с отношением 100:1 В прототипе использован редуктор с передаточным числом 1000:1. Вы можете использовать любой другой редуктор, умещающийся в прозрачной сфере с внутренним диаметром 140 мм. Выберете редуктор с большим передаточным числом, что позволит уменьшить частоту вращения (7 об/мин). Конструкция робота Первым делом нужно обратить внимание на корпус устройства. Он должен быть прозрачным и иметь достаточные размеры для размещения редуктора и электрических схем. В прототипе был использован сферический корпус диаметром 140 мм. Стыкующиеся из половин прозрачные сферы продаются во многих магазинах, специализирующихся на товарах для любителей. Подобные сферы используются любителями для размещения в них различных поделок «выходного дня». Если вы не сможете приобрести такую сферу в местном магазине, то можете заказать ее в Images SI (см. список деталей конструкции в конце главы). Пластиковый корпус является хрупким. Не заставляйте вашего робота подниматься или спускаться по ступеням, корпус может разбиться, что приведет конструкцию в негодность. Разделите две половины корпуса. Сперва необходимо точно определить геометрический центр каждой полусферы. В этих точках будут присоединяться концы вала редуктора. Определение положения точки центра может показаться более легким, чем это есть на самом деле. Для отыскания центра я был вынужден нарисовать на бумаге окружность по периметру полусферы, затем нарисовать квадрат вокруг окружности со сторонами, касающимися окружности (см. рис. 12.4). Проведя диагонали квадрата, я нашел геометрический центр окружности. Затем полусфера была помещена на рисунок окружности. Если вы держите голову прямо напротив сферы, вы сможете визуально определить центр и отметить его на сфере с помощью маркера. Я попробовал этот способ раз или два, но результаты были неудовлетворительны. В конце концов, я наклеил бумагу на фанеру толщиной 1,5 мм и просверлил небольшое отверстие в отмеченном центре. Затем я взял небольшой штырь длиной 63 мм и зафиксировал его в отверстии, следя за тем, чтобы он был перпендикулярен плоскости. Возьмите полусферу за обод и совместите ее диаметр с нарисованной окружностью. Конец штыря укажет положение центра с большой точностью. Отметьте положение центра сперва на одной полусфере, а затем – на второй. 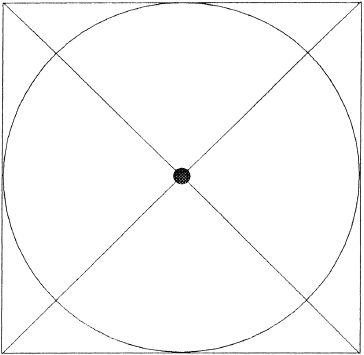 Рис. 12.4. Чертеж для нахождения центра окружности Следующим шагом будет изготовление запорного устройства фиксатора внутри сферы, которое будет препятствовать свободному вращению вала редуктора внутри сферы. Поскольку вал зафиксирован, то это приводит к вращению самого редуктора внутри сферы. При этом центр тяжести перемещается, и робот двигается вперед. В то же время конструкция фиксатора вала редуктора должна обеспечивать по необходимости разъем и соединение половин сферы. Система, которую я использую, иллюстрирована рис. 12.5 и 12.6. Для этой цели мной был использован тот же тип прозрачного пластика, из которого сделана сфера, а вы можете изготовить эти части из других материалов, например из латуни или дерева. 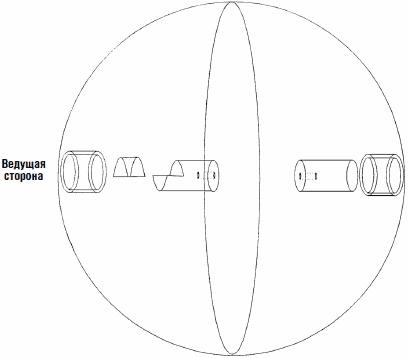 Рис. 12.5. Детали привода прозрачной сферы 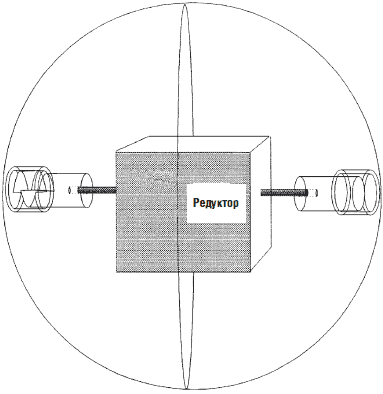 Рис. 12.6. Положение редуктора внутри сферы Первая деталь представляет собой небольшой отрезок трубки с внешним диаметром 15 мм, внутренним диаметром 12 мм и длиной 9,5 мм. Эта трубка приклеивается к центру полусферы в отмеченной нами ранее точке. Внутрь трубки вклеивается половина разрезанного вдоль стержня диаметром 12 мм и длиной 9,5 мм. Эта часть может быть вклеена в трубку перед приклеиванием трубки к поверхности полусферы. Затем отрежьте небольшой кусочек стержня из жесткого пластика диаметром 12 мм. Распилите его вдоль по длине 9,5 мм и удалите половину. Это можно сделать при помощи ножовки или шлицовки. Сперва пропилите щель на глубину 9,5 мм, а затем сделайте горизонтальный пропил для удаления одной половины. Проверьте, что стержень заходит на всю глубину в трубку 15 мм и надежно соединяется с внутренней поверхностью полусферы. Если этого не происходит, подпилите полукруглый конец стержня. В другом конце стержня просверлите по центру отверстие, соответствующее диаметру вала редуктора.
Конструкция крепления ко второй полусфере проще по изготовлению. Приклейте небольшой отрезок трубки с внешним диаметром 15 мм и внутренним диаметром 12 мм к центру полусферы, используя нанесенную отметку. Отрежьте небольшой кусок стержня диаметром 12 мм. Убедитесь, что стержень легко вставляется в трубку 15 мм. Если нет, то возьмите небольшой кусок наждачной бумаги средней зернистости. Оберните наждачную бумагу на расстоянии 12 мм от конца стержня. Зачистите конец стержня, вращая его в кольце наждачной бумаги. Продолжайте зачищать стержень до тех пор, пока он не будет легко входить с отверстие трубки. Затем просверлите в другом конце стержня отверстие, соответствующее диаметру вала редуктора. Необходимо, чтобы редуктор располагался точно в центре сферы. Вставьте конец вала редуктора в отверстие в пластиковом стержне. Вставьте стержень в трубку, прикрепленную к внутренней поверхности полусферы нашего шара. Добейтесь центрального положения редуктора и отметьте глубину, на которую вал редуктора входит в пластиковый стержень. Выньте редуктор из отверстия в стержне. Приготовьте небольшое количество эпоксидного клея. Нанесите эпоксидный клей на вал редуктора и вставьте его в отверстие стержня. Перед тем как продолжить, дождитесь высыхания клея. Как только клей высохнет, мы должны вклеить второй пластиковый стержень с противоположной стороны. Вставьте приклеенный стержень в полусферу. В противоположный конец вала вставьте другой пластиковый стержень. Соедините половины сферы в первый раз. Заметьте глубину, на которую вал редуктора войдет в пластиковый стержень, и добавьте 3 мм для компенсации возможной ошибки. Приклейте и дайте клею подсохнуть. Во время склейки второго конца вала редуктора убедитесь, что половины сферы смыкаются нужным образом. Электрическая схема Электрическая схема представляет собой электронный ключ, управляемый интенсивностью светового потока. Когда уровень средней окружающей освещенности мал (возможна подстройка порогового значения), то схема отключает питание двигателя редуктора. Порог чувствительности схемы регулируется с помощью переменного резистора V1. В изготовлении схемы нет ничего сложного. Если вы не хотите приобрести или изготовить печатную плату, то схема может быть собрана и смонтирована на макетной плате. Работа схемы Схема содержит операционный усилитель структуры КМОП, используемый в качестве компаратора напряжений. Компаратор сравнивает значения двух входных напряжений. Одно из напряжений называется опорным и обозначается Vоп. Это значение сравнивается с входным напряжением, обозначаемым Vвх. Когда значение Vвх. превышает или падает ниже Vcn., то состояние выхода компаратора изменяется. Два входных напряжения подаются на выводы 2 и 3 ИС. Вывод 2 (инвертированный вход) соединен с источником опорного напряжения, образованного делителем напряжения на резисторах R1 и R2 и составляющего примерно 1,5 В. Фоторезистор R3 образует вместе с переменным резистором V1 другой делитель напряжения, который соединен с неинвертированным входом ОУ. В данной схеме включения ОУ нет резистора обратной связи между выходом ОУ (вывод 6) и одним из его входов, что позволяет ОУ работать в режиме максимального усиления (открытая петля). В качестве датчика освещенности используется CdS фоторезистор. Фоторезистор изменяет свое сопротивление пропорционально величине светового потока, падающего на его поверхность. CdS фоторезистор имеет наибольшее сопротивление в полной темноте. С увеличением интенсивности светового потока его сопротивление падает. В данной схеме CdS фоторезистор включен в схему делителя напряжения. Изменение сопротивления CdS фоторезистора приводит к изменению падения напряжения на переменном резисторе V1, соединенным с выводом 3 ОУ. По мере нарастания потока освещенности сопротивление CdS фоторезистора уменьшается, и соответственно увеличивается падение напряжения на переменном резисторе V1. Увеличение падения напряжения означает повышение напряжения на выводе 3. При помощи переменного резистора можно установить уровень срабатывания компаратора для различных значений освещенности. Изготовление схемы не составляет большого труда. Вы можете выполнить монтаж на макетной плате с помощью пайки точка-точка. Можно воспользоваться печатной платой из набора или изготовить ее самостоятельно. Чертеж печатной платы представлен на рис. 12.7. Расположение деталей на печатной плате – рис. 12.8. 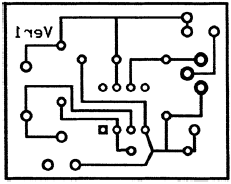 Рис. 12.7. Чертеж печатной платы 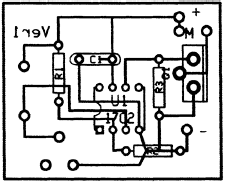 Рис. 12.8. Расположение деталей на печатной плате После сборки схемы необходимо подстроить с помощью переменного резистора V1 желаемый уровень освещенности, при котором включается схема. При помощи зажимов «крокодил» временно соедините схему с двигателем редуктора. Питание схемы и двигателя обеспечивается с помощью двух элементов АА, причем батарейный отсек для этих элементов приклеивается к редуктору в момент окончательной сборки. Убедитесь, что батарейный отсек обеспечивает легкую вставку и замену элементов. При выставлении порогового значения уровня освещенности используйте достаточно низкие уровни. В противном случае, во время движения робота по полу, он будет каждый раз останавливаться, попадая в тень, если пороговое значение уровня освещенности слишком высоко. Окончательная сборка После подстройки порогового значения уровня освещенности вы можете приступить к окончательной сборке. Приклейте батарейный отсек для элементов АА к корпусу редуктора, тщательно следя за тем, чтобы клей не попал на шестерни редуктора. Затем приклейте плату со схемой, также убедившись, что капли клея не попали в шестеренчатый механизм. Присоедините источник питания. В этот момент редуктор, возможно, начнет вращаться. Чтобы правильно выполнить сборку, перенесите механизм в более темное помещение, чтобы выключить схему. Поместите конструкцию внутрь сферы. Теперь вынесите робота на свет. Редуктор должен включиться. Поставьте робота на поверхность пола. Робот должен перемещаться вперед или в направлении источника света. Если робот перемещается в обратном направлении, остановите его, выньте редуктор и плату электроники и поменяйте местами провода, идущие к двигателю. Передвижение Когда я начал наблюдать за «поведением» робота, то был крайне удивлен. Первоначально я думал, что робот будет легко попадать в «ловушки». Оказалось, что это не так. Когда робот доезжает до угла и там останавливается, то вращение редуктора внутри начинает его раскачивать вверх и в сторону, перемещая его вес к «верхней» мертвой точке и таким образом выталкивая робота из угла. Усовершенствование конструкции В первоначальном варианте я планировал применить рулевой механизм для того, чтобы робот следовал за источником света. Однако выяснилось, что небольшой рулевой механизм не имеет достаточного веса для быстрого поворота робота в каком-то направлении. В процессе длительного перемещения на направление движения оказывают сильное влияние другие факторы (рельеф, наличие препятствий и т. д.). По этой причине я отказался от рулевого механизма. Тем не менее усовершенствование конструкции может осуществляться именно в этом направлении. Введение добавочного режима поведения Робот первоначально находится в покое, но при определенном уровне освещенности он переходит в «активную» фазу. Мы можем ввести еще один поведенческий уровень (питание) при добавлении некоторых компонентов (две солнечные батареи и два управляющих диода) и дополнительной схемы компаратора. Второй компаратор будет отключать двигатель при достаточно высоком уровне внешней освещенности, включая режим зарядки элементов АА от солнечной батареи. В этом случае в качестве элементов АА должны быть использованы NiCd аккумуляторы. На рис. 12.9 показана схема поведения робота. Когда уровень освещенности низок, то робот выключен, или мы можем сказать, что он находится в состоянии «отдыха». По мере нарастания уровня освещенности, она достигает точки, когда двигатель включается, и робот переходит в режим «поиск». При дальнейшем значительном возрастании уровня освещенности, при каком-то значении второй компаратор выключит двигатель, и NiCd аккумуляторы будут заряжаться от солнечной батареи, обеспечивая режим «питания». 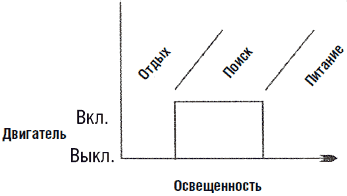 Рис. 12.9. Организация поведения по «уровням» Если вы решите построить такую систему «питания», то необходимо проследить, чтобы ток, потребляемый схемой компараторов, не превышал ток, вырабатываемый солнечной батареей. В противном случае зарядка NiCd аккумуляторов окажется невозможной. Список деталей для изготовления робота-солнечного шара • (1) Прозрачная пластиковая сфера 140 мм (см. выше текст настоящей главы). • (1) Редуктор (см. выше текст настоящей главы) • (1) Стержень из твердого пластика длиной 150 мм диаметром 12 мм • (1) Пластиковая трубка длиной 75 мм, внутренний диаметр 12 мм, внешний – 15 мм Электронные компоненты • (1) ОУ КМОП-структуры на 5 В ALD 1702 или аналогичный • (1) Резистор 33 кОм, 0,25 Вт • (1) Фоторезистор CdS • (1) Подстроечный резистор 4,7 кОм • (2) Резистор 15 кОм • (1) Конденсатор 0,0047 мкФ • (1) Транзистор TiP 120 NPN Darlington • (1) Макетная плата Детали можно заказать в: Images SI,Inc. 39 Seneca Loop Staten Island, NY 10314 (718) 698-8305 |
|
|||
|
Главная | Контакты | Прислать материал | Добавить в избранное | Сообщить об ошибке |
||||
|
|
||||