|
||||
|
Притяжение марса Часть 2 Орбитальный модуль MRO В прошлом номере нашего журнала (см. «Взлёт» №11/2005, с. 44-47) мы уже рассказывали об основных целях и задачах очередной американской научной экспедиции по исследованию Марса. Напомним, она началась 12 августа этого года, когда с космодрома на мысе Канаверал с помощью ракеты-носителя «Атлас V» в космос была выведена автоматическая межпланетная станция MRO (Mars Reconnaissance Orbiter). Ее встреча с Марсом запланирована на 10 марта 2006 г. Вторая публикация по новой марсианской программе США посвящена основным техническим решениям и особенностям пока еще только находящегося на пути к Красной планете американского исследовательского аппарата. MRO – это космический аппарат нового поколения, разработанный в находящемся в г. Денвере (штат Колорадо) отделении «Космические системы» американской корпорации «Локхид Мартин» (Lockheed Martin Space Systems). Там же проводилась и его сборка. По мнению большинства специалистов, новый аппарат является более совершенным по сравнению с теми орбитальными модулями, которые использовались в ходе предыдущих экспедиций, организованных НАСА к Красной планете. Плюс – это самый крупный из всего имеющегося на сегодня набора исследователей загадочной планеты, манящей к себе уже не одно поколение астрономов. Кроме того, это первый марсианский орбитальный модуль, который разработан специально для выполнения такого сложного процесса, как торможение за счет силы сопротивления мало изученной атмосферы Марса. Именно так будет выглядеть заключительная фаза полета станции, после чего MRO окончательно выйдет на заданную орбиту вокруг Марса. В собранном состоянии, с учетом полной его заправки, масса орбитального модуля составляет не более 2180 кг (иначе РН «Атлас V» не смогла бы вывести его в космос на надлежащую траекторию). При этом масса научного оборудования и необходимой исследовательской аппаратуры была ограничена 1031 кг. Топливный отсек может вмещать не более 1149 кг горючего. Топливо будет расходоваться двигателями коррекции траектории полета межпланетной станции на пути к конечному пункту маршрута, в процессе выхода на орбиту и т.д. Конструктивно MRO представляет собой сложный набор рабочих элементов и научно-исследовательской аппаратуры, которые навешены на каркас («скелет»), выполненный из прочных, но легких материалов – титана, алюминия (применены алюминиевые конструкции сотового типа) и различных композитов. У данного космического аппарата имеется несколько подсистем: двигательная, электроэнергетическая, связи, обработки данных, а также управления, навигации и контроля.  Вверху: в сборочном цехе на территории космического центра им. Кеннеди идет подготовка к заключительному тестированию главной антенны подсистемы связи Внизу: специалисты компании «Локхид-Мартин» завершают монтаж панелей солнечных батарей аппарата. Космический центр им. Кеннеди  Двигательная подсистема (Propulsion Subsystem) предназначена для выполнения коррекции траектории полета в процессе следования MRO к назначенной точке вывода модуля на околомарсианскую орбиту и последующего торможения. На борту аппарата в общей сложности размещены 20 ракетных двигателей трех типов: – шесть самых крупных (тягой по 17,3 кгс каждый) предназначены для торможения аппарата после прибытия к Марсу с тем, чтобы выйти на орбиту при помощи сил гравитации планеты. Запуск всех шести двигателей будет произведен одновременно по команде. Эти же двигатели выполняли первую коррекцию траектории, проводившуюся через 15 суток после старта; – шесть ракетных двигателей средней мощности (тягой по 2,2 кгс каждый) предназначены для выполнения второй фазы коррекции траектории полета на пути к Марсу и будут затем задействованы в процессе торможения модуля MRO в верхних слоях атмосферы Красной планеты; – остальные восемь малых двигателей (тягой всего около 90 гс каждый) будут использоваться в процессе контроля ориентации космического аппарата, выхода на орбиту Марса и т.п. Все упомянутые двигатели космического аппарата работают на гидразине, который хранится в специальном топливном баке. Подача гидразина из бака в двигатели осуществляется при помощи находящегося под давлением в отдельном баке гелия. Согласно расчетам специалистов, до 70% объема топлива будет использовано в процессе выхода модуля на околомарсианскую орбиту. 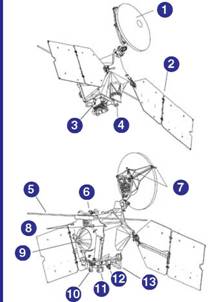 1. Антенна высокой мощности (главная антенна связи) 2. Солнечные батареи 3. Камера MARCI 4. Широкоугольная камера CTX 5. РЛС дистанционного зондирования 6. Оптическая навигационная камера 7. Антенны низкой мощности (малые антенны связи) 8. Ракетные двигатели 9. Корректирующие орбитальные двигатели 10. Малый спектрометр CRISM 11. Приемоизлучающая аппаратура комплекса MCS 12. Комплекс «Электра» 13. Фотоаппаратура высокого разрешения HiRISE для детальной съемки поверхности Марса 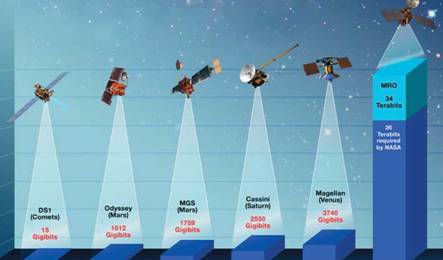 MRO будет передавать в пять раз больше информации, чем аппараты пяти предыдущих экспедиций Электроэнергетическая подсистема (Power Subsystem) американского космического аппарата предназначена для обеспечения всех его систем электрической энергией, получаемой при помощи двух солнечных батарей и из двух никель-гидридных аккумуляторных батарей. Последние, как можно догадаться, будут использоваться только в тех случаях, когда аппарат будет находится в зоне тени или же когда солнечные панели «потеряют» Солнце. Каждая солнечная батарея имеет 5,35 м в длину и 2,53 м в ширину. Фронтальная (рабочая) площадь батареи достигает 9,5 м2 и покрыта 3744 светочувствительными элементами. По заявлению разработчиков, данные элементы способны преобразовать в электрическую до 26% попавшей на них солнечной энергии. По результатам испытаний в условиях Земли было установлено, что обе панели могут генерировать в общей сложности до 6 кВт электроэнергии. Однако в районе Марса, где Солнце естественно светит слабее, они смогут давать только лишь 2 кВт. Подсистема связи (Communications Subsystem) предназначена для поддержания связи с центром управления на Земле и включает в свой состав три антенны, три усилителя и два передатчика. Возможности бортовой аппаратуры теоретически позволяют MRO осуществлять передачу до 6 мегабайт данных в секунду. Однако по мнению специалистов, в реальности модуль, находясь на околомарсианской орбите, сможет передавать не более чем 3,5 мегабайт данных в секунду. Но даже этот показатель минимум в десять раз перекрывает возможности любой из предыдущих межпланетных станций, направленных НАСА к Красной планете. Вообще, надо сказать, руководство и рядовые сотрудники НАСА, а также занятые в рассматриваемом проекте специалисты по всему миру с нетерпением ждут того момента, когда MRO начнет отправлять на Землю буквально море научной информации, собранной в процессе полета и уже на орбите Марса. И если уж два небольших марсохода «Спирит» и «Оппотьюнити» привнесли столько новой информации, то оснащенный новейшей аппаратурой MRO может совершить определенный научный переворот и кардинально изменить представления людей о далекой планете. Главная антенна по своим размерам уступает только солнечным панелям орбитального модуля и представляет собой параболическую тарелкообразную антенну диаметром 3 м. Так же как и солнечные панели, она крепится к основной части аппарата при помощи специально разработанного устройства, благодаря которому может направляться по командам с Земли в любую сторону – без необходимости переориентации самого космического аппарата. Данная возможность весьма важна, поскольку для устойчивой связи с центром управления эта антенна должна быть постоянно направлена в сторону Земли. Остальные две антенны MRO – резервные и имеют малую пропускную способность. Их основная задача – работа в чрезвычайных ситуациях, а также во время старта и перехода на орбиту Марса. Малые антенны смонтированы на главной и смотрят в противоположные стороны, благодаря чему эти «блюдца» уже не нужно направлять непосредственно в сторону Земли. Как бы ни был ориентирован аппарат относительно Земли, одна из малых антенн будет направлена примерно в ее сторону, и связь будет обеспечена. Из трех усилителей, размещенных на борту космического аппарата, два являются более мощными (100-ваттными) и делятся на основной и резервный (предназначен для работы в случае выхода из строя первого, основного усилителя). Третий усилитель – менее мощный (35 Вт) и обеспечивает работу в другом диапазоне частот. Передатчики преобразуют информацию из цифрового вида в радиосигналы для передачи в центр управления полетом и наоборот, а также выполняют роль радиомаяков-ответчиков, т.е. передают на Землю информацию о местонахождении станции и автоматически посылают ответ в случае обнаружения входящего сигнала. В отличие от предыдущих межпланетных станций, на MRO американцы решили установить не только радиопередатчики, работающие в X-диапазоне частот, но и еще один дополнительный передатчик Ка-диапазона. Новый передатчик потребляет меньше энергии для отправки одного и того же объема информации, но его сигнал более подвержен влиянию земной атмосферы. Такой шаг и был в общем-то предпринят американцами сугубо с целью практического изучения возможностей двух типов радиопередатчиков.  … а двигатели-то все же наши! Первая ступень ракеты-носителя «Атлас V», которая вывела в космос аппарат MRO, укомплектована российскими ЖРД типа РД-180 Основные характеристики аппарата MRO Высота наибольшая, м 6,5 Ширина наибольшая (размах солнечных панелей в раскрытом виде), м 13,6 Максимальная стартовая масса, кг 2180 Масса научной аппаратуры, кг 139 Масса топлива, кг 1149 Суммарная площадь рабочих частей солнечных батарей, м 2 19,0 Длина рабочей части солнечной батареи, м 5,35 Ширина рабочей части солнечной батареи, м 2,53 Основные характеристики РН «Атлас V» (с верхней ступенью «Центавр») Высота с полезной нагрузкой, м 57,4 Диаметр обтекателя полезной нагрузки, м 4,0 Диаметр стыковочной секции, м 1,2 Стартовая масса,т 333 Масса топлива и окислителя для первой ступени, т 284 Тип двигателей первой ступени РД-180 (Россия) Тип двигателя второй ступени RL-10 (США) Следует отметить, что дополнительно на борту MRO установлен еще и комплекс «Электра» (Electra), который предназначен для обеспечения УКВ-радиосвязи с уже находящимися в районе Марса орбитальными станциями, а также с марсоходами, доставленными на поверхность планеты (в случае, если они не прекратят к тому времени функционировать). «Электра» будет собирать с остальных станций информацию и передавать ее на Землю, а обратно посылать, если потребуется, необходимые команды. Подсистема обработки данных (Command and Data Handling Subsystem) включает в свой состав бортовой компьютер, построенный на базе микропроцессора X2000 Rad 750 (специально адаптированный к условиям открытого космоса 133-МГц процессор PowerPC), и твердотельный накопитель объемом 160 ГБ. Последний предназначен кроме всего прочего для временного хранения информации с бортовой научно-исследовательской аппаратуры до того, как она будет передана на Землю. Подсистема управления, навигации и контроля (Guidance, Navigation and Control Subsystem) включает в свой состав аппаратуру, при помощи которой будет происходить управление и ориентация космического аппарата на всем протяжении его работы. Возможности данной подсистемы позволяют несколько раз в секунду производить сравнение карты окружающего звездного неба с эталонными фрагментами оного, которые «зашиты» в память бортовой системы навигации. Имеются также 16 сенсоров (датчиков) солнечного света (из низ восемь – основных, а восемь – резервных), с помощью которых можно определять направление на Солнце для точной ориентации солнечных батарей. Есть также на борту космического аппарата акселерометры, лазерные гироскопы и пр. Специалисты НАСА решили впервые применить на станции специальную оптическую навигационную камеру (Optical Navigation Camera). В случае получения положительного опыта ее применения она впредь будет устанавливаться на всех космических аппаратах, посылаемых к Марсу. |
|
|||
|
Главная | Контакты | Прислать материал | Добавить в избранное | Сообщить об ошибке |
||||
|
|
||||